
by Chris Morris and Planning Engineer (Russ Schussler)
Technically, what are wind and solar doing to South Australia’s grid? And why is South Australia’s electricity so expensive?
Part 1 covered renewables impacts so far on the major power system in Australia. Part 2 covered how the renewables hype doesn’t match the reality.
This post provides details about the extra services and functions a grid provides and how the grid in Australia is being impacted by the increasing penetration of wind and solar generation. And how this makes Australia’s electric power so expensive.
Reactive Power
Alternating Current (AC) power generation aims to produce an alternating voltage in the shape of sine wave, whereby the current has a similar wave at the same frequency. However, the current may not be timed in phase with the voltage. AC power can have three types of load, depending on how it affects the timing of the current to the voltage: resistive, inductive & capacitive. For a purely resistive load, the current and voltage are co-incident. However, this is not the normal case. Electric loads and grids have both inductive and capacitive elements. Inductive elements want to maintain constant current flows, while capacitive ones want to store charge (voltage). Active power is measured in Watts. With AC being a cycle, there is another value orthogonal to it, called reactive power, measured in units of Volt Amps Reactance or VARs. The diagram below explains the relationship.

Generators and inverters produce some mixture of “real” and “reactive” power. That is why them and transformers are rated in MVA, not MW like their prime movers are. Real power, in watts, is the form of electricity that powers equipment and does work. Reactive power, in VARs, is the energy supplied to create or be stored in electric or magnetic fields in and around electrical equipment. VARs are 90° out of phase with real power. Reactive power (inductance) is particularly important for equipment that relies on magnetic fields for the production of induced electric currents (e.g., motors, transformers, pumps, and air conditioning.) Negative reactive power (capacitance) seeks to slow voltage waves by acting as a store for charges. The balance between real and reactive power is adjusted to meet the needed load and grid requirements.
Transmission line elements both consume and produce reactive power. Under conditions of light loads, transmission lines are net producers, and at heavy loads, they are heavy consumers. Reactive power consumption by these loads tends to depress transmission voltage, while production of transmission voltage (by generators, transformers or synchronous condensers (syncons) or injection (from storage devices such as capacitors) tends to support voltage. Due to the characteristics of components on the grid , reactive power can be transmitted only over relatively short distances during heavy load conditions. If reactive power cannot be supplied promptly and in sufficient quantity, voltages decay, and in extreme cases a “voltage collapse” may result. If there is too much capacitance, voltages rise to excessive levels, damaging the insulation of equipment.
Worldwide, motors comprise about half the load on the grid. Air conditioning loads are almost exclusively motors. As well as needing the active power, motors produce significant reactive power. The distribution Network elements (local “low voltage (<66kV)” lines, transformers and switchyard components) have to absorb this reactive power, usually by increasing the voltage at the transformers. If the system can’t compensate for the reactive power or has no more capacity, then the voltage starts to drop, while the motors’ current and reactive power increases. This compounds the overvoltage problem – why you get brownout in the suburbs on those muggy hot afternoons.
Because of the lines and transformers in a grid, the VARs at each part, or even at either end of a single transmission line, can be significantly different. That means compromises or corrections need to be made throughout the distribution & transmission network. This is done by modifying generation output settings, changing transformer tap point settings and switching in or out capacitors, inductors and synchronous condensers installed at strategic locations. Grid operators monitor the various parameters, then adjust the settings as the generation source and loads change.
All this explanation and discussion about reactive power may seem esoteric and irrelevant. It isn’t. The large 2003 blackout in the USA/ Canada was caused because they weren’t managing reactive power properly because they had an inadequate system understanding.
Modern renewables are often sited a long way from where the load will be consumed, requiring long spur transmission lines. Consider the grid map showing current and proposed generators of New South Wales as an example – the load centres are on the east coast and the wind & solar generation a long way west. There will need to be long and uprated transmission lines to take the power east. The loading on those lines will be unpredictably variable. There will be times when they carry minimal current as well as times when they are at or near full rating. This variability requires the switchyards along the line to have expensive equipment to manage the VARs and stabilise the voltage. This extra switchyard equipment will be needed when there is little generation to provide the VARs. All of this additional switchyard compensation adds substantially to the cost.
There are problems with having transmission from generator to load by separate routes – effectively paths in parallel from an electricity flow viewpoint. There are also problems with running transmission routes in parallel. Because the impedance (resistance in an AC circuit) can vary significantly between the lines, circulating currents can occur that increase the line loading. The magnetic field lines around a transmission line can also induce currents in adjacent conductors when there are two circuits on the same towers. There are also additional risks associated with parallel circuits. When a low rating line constrains the capacity of a bigger line, the small line will reach its rating long before the other line approaches its rated capacity. This condition is called the spring washer effect. It can be corrected by using compensation devices in the switchyard, but this increases the cost and complexity of the system.
Frequency Control & Inertia
The frequency is the timing between wave cycles in an AC system 60Hz (a Hertz is one cycle per second) and 50Hz in most of the rest of the world. The frequency has to be the same across the whole grid – it is one of the things that defines it. A stable grid frequency is critical for effective operation. Thermal plants usually provide this by using governor control, whereby the frequency drives the plant output through a negative feedback device. The grid system operators may also run real time or short period dispatch, whereby the plant operators increase or decrease load over short time periods on grid operator’s instructions.
The inertia, provided by the rotating machinery of the generator, serves to slows the rate of change of frequency (RoCoF) . The slower the frequency changes occur, the less stress for the plant on governors. And as there is linkage, a small RoCoF in “normal” grid fluctuations will also stabilise the voltage and reactive power requirements.
However in recent times, there have been significant and rapid swings in the Australian grid frequency between the control limits, shown in the graph below. The gray region is the deadband of allowable frequencies where no intervening measures need be taken by the grid operators. When outside the deadband region, generators are supposed to be offering primary frequency response support – for underfrequency (load is greater than generation), grid operators increase the generators’ output. This is either done automatically or by dispatching plant to increase load. From the rate of frequency decline, calculations indicate there could have been at least 600MW shortfall in generation over the five minute dispatch process. The cause of the variability observed hasn’t been positively identified, but is likely to be uncontrolled solar generation. If that is the case, then it indicates that faster acting and more expensive frequency control services are needed.

Inertia on a renewables grid can be provided by synchronous condensers or by large battery banks with specialised electronics. Of course, the batteries have to have enough charge in them to function, so they are reserved for just that purpose and thus can’t be used for other purposes like general market dispatch. However, AEMO does not appear to believe that renewables and batteries are a substitute for the frequency response provided by synchronous units. To quote the latest available report:
“To comply with the requirements of IPFRR, Semi-Scheduled generators will typically need control of active power that allow for simultaneous MW curtailment, MW ramping, frequency response outside a relatively small frequency deadband, and ongoing variation in input energy. While such MW control capabilities do often exist in isolation, when they are tested simultaneously, and in an ongoing manner, software problems have often been found. This then requires further development, updates and testing to address, a process that has in some cases proven significantly more time consuming than initially expected.”
To manage the frequency balancing, the grid operates short period dispatches, mainly raising and lowering generation over short time periods: 5 minute, 60 seconds and 6 seconds are the main time periods. The time reflects how quickly the grid operator can respond to be up to the dispatch level. Because of frequency control problems that are occurring, Australia grid operators now proposing putting in place a 1 second response time dispatch. They go out to the market for bids from suppliers of these resources. This process is referred to as Frequency Control Ancillary Services (FCAS). Provision of FCAS is expensive for the NEM. In the first quarter of 2020, FCAS cost was about $110M, but this has dropped back to about $40M a quarter. In 2010, before there was significant wind or solar on the grid, the FCAS cost was about $2M a quarter. FCAS costs are operational charges to be paid by consumers for the privilege of the renewables penetration.
As an aside, for those that want more understanding of renewables and market grid operation, the commentary at WattClarity is worth following. They explain events well and use their showcased analysis software to provide detail and insight.
Reserves
Resolving frequency control and inertia concerns does not resolve the imbalance between load and generation. This is where generation reserves come in. Reserves are plant capacity that is not actually generating, but is available to power into the grid within a short time period. By rebalancing the generation/ load, the frequency departures are resolved.
The reserves needed are usually sized to cover the loss of the largest supply item on the grid. This can be a circuit on a transmission line or the biggest single generation supply point. For South Australia, this is generally the rating of the Heywood interconnector when it is importing power into the state. Reserves can consist of large grid-following battery banks with sufficient charge in them to run for quarter of an hour or more. To reduce the risk of single point failure, the reserves should come from a variety of sources. Some of them may be units that are partially loaded and can ramp up their generation; others may be hydropower units acting as synchronous condensers, or they may be batteries.
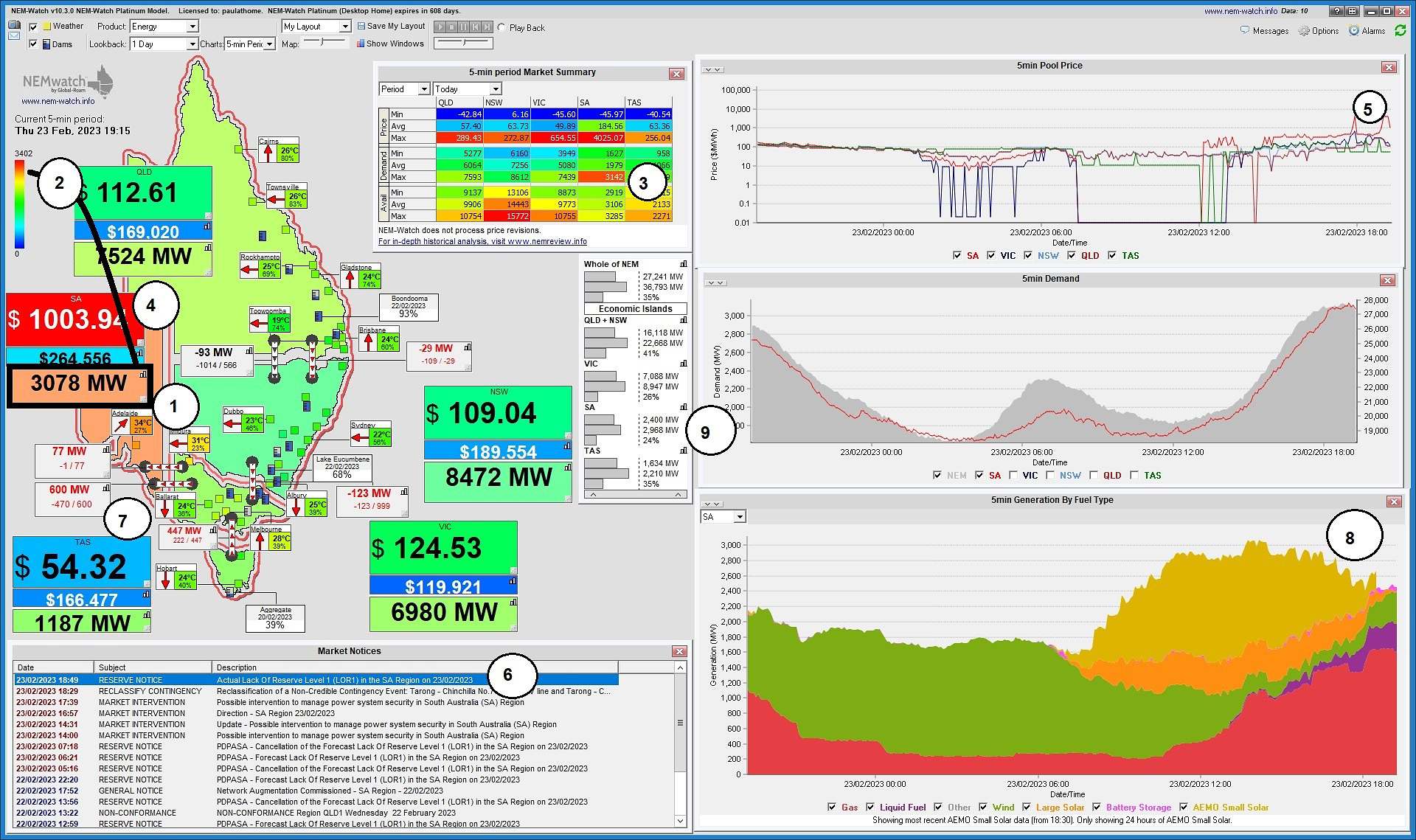
To illustrate the problems with lack of reserves, South Australia power generation has been having major problems recently: the –9th , 16th and 23rd February in particular. On these days, the wind diminished early in the day, but the lost generation was covered by the grid solar and domestic solar. There were also gas turbines running to provide the inertia. As the afternoon went on and solar dropped, they needed to load first the gas turbines, then start the diesel engines. This is shown in the graph from Wattclarity below. Note this is only South Australian generation; it does not show flow across the interconnectors which at the last time interval was 677MW. Batteries provided very little power. It appears that despite batteries supposed to be there providing generation when there is a lull in renewables’ generation, it is there unused but providing FCAS reserves. This is probably because it gives the owners more income. But this is counter to why the batteries were supposed to have been installed. What is providing the backup generation, other than thermal plant which renewables and batteries are supposed to replace?

Part 1 and Part 2 gave examples of this duck curve problem . The Heywood link was running at capacity, but the grid declared a reserve shortage as there was not enough market bids to supply extra generation to cover the system need in the event of a potential trip of the interstate connector. Graphics at Box 6 provide a description of the system during this event. All this meant the price went very high, punishing the market buyers. And for those that claim negawatts and interruptible power is the answer, Part A6 on the 23rd event shows there was only 1MW available. As the Wattclarity author described it, “decidedly underwhelming”.
The same general process would occur for over-frequency situation, but for this circumstance generation would be shed or batteries switched to charge. That is a process a lot easier to manage.
Load Shedding
Grid operation is more than just keeping the load and generating balanced and providing a stable frequency. Grid capabilities must be able to cover its fundamental operating parameters like frequency, voltage and reactive power when things go wrong. Examples would be when a lightning strike occurs, or a transmission line failure or a generation plant trip. The grid needs both inertia and fast acting reserves as backup. Protection systems take time to sense and then react to changes in frequency. Circuit breakers typically take 3-10 cycles to fully disconnect once they receive the trip signal, but these are only the last steps in the chain. The protective electronic sensors have to sense that the frequency or line impedence is outside its allowable range, and then activate the switching relays and the switches take time to break the circuit. The gap between allowable and load shedding is a fraction of a Hertz. To give time for the protection and reserves to function, the frequency (and voltage) have to decay as slowly as possible, which is where the (RoCoF) becomes important. There is a relationship between RoCoF, inertia and load lost as a fraction of total load, but even a change of 1 Hertz decline a second is considered risky.
That is why when major events happen, inertia to slow the RoCoF is so critical. South Australia went black in 2016 because a lot of wind generators tripped off, the major interconnector got overloaded and tripped, then there was not enough inertia, and the frequency collapsed so fast that system load shedding schemes couldn’t operate and everything protectively shut down.
Because of the blackout, AEMC now takes the problem of low inertia very seriously. They instituted rules setting inertia requirements for each state, particularly South Australia. AEMO used the rules to set minimum inertia levels. This means that gas turbines are required to be on, while wind or solar is taken off the grid, which overrides the merit order bid stack. South Australia is now replacing some of the inertia previously supplied by gas turbines with synchronous condensers and grid forming battery banks, using reserved sections of the giant batteries. This has added further to the cost of operation.
AEMC has been struggling with the problems of frequency management in a renewables dominated grid. They are looking at tight requirements for frequency management, RoCoF and related issues. AEMO will then use those to set rules for compliance by each state’s grid . Whatever the final rules and requirements are determined to be, they will increase costs to the power user, both in capital and operating costs.
Automated load shedding is usually managed at the distribution network level. These schemes normally work on under-frequency trigger setpoints. This is achieved by tripping complete feeder circuits from substations. There will be target load reductions (typically 10 to 20%) and these typically occur in two separate stages.
As might be expected, problems are occurring in South Australia associated with the automatic under-frequency trip levels When there is significant uncontrolled domestic solar on the grid, then there is very little grid-supplied load. This means that the underfrequency load shedding will have little effect stopping frequency decline. AEMO have put limits on the Heywood interconnector well under the cables’ rating in certain conditions to counter this risk. The SA Network company is also looking for solutions to these concerns. There are major potential problems during the daily duck curve rampings. The grid can’t protect itself if a significant event occurs while the power is having to be rapidly increased. AEMO has recognised this risk but there are no measures put in place yet. Previous experience suggests that it will likely take another major outage event before a solution is found.
System functions during frequency excursions
The graph below of an idealised frequency excursion caused by a generation trip shows how it all fits together. The section labelled ‘dynamic response’ is normal frequency control behaviour. After the incident, the slope of the RoCoF is a function of size of load loss and the inertia. The higher the inertia, the shallower the RoCoF slope. When the frequency is dropping, the generation frequency control and fast acting reserves put extra power into the grid. The frequency nadir means the input is enough to stabilise things. The higher the RoCoF, the lower the nadir.
After the nadir, frequency slowly recovers as the slower acting reserves come in. Often, there is no steady state section, but there is enough excess generation from the reserves and existing generation picking up load to bring the frequency back to the normal value.

The above graph shows the “ideal” grid behaviour to a loss of generation. In reality, the behaviour can be more like the graph below, which plots the number of the Queensland coal stations tripping in a cascade. Here the frequency got so low that under frequency load shedding occurred.

As part of the Queensland failure, the voltage there dropped so the reactive power went up, which tripped switchyard compensation. The current inrush flows in the interconnector got so high that it tripped, islanding Queensland for 15 seconds until things were stable and balanced enough to reconnect automatically.
Queensland was “saved” by the high grid inertia. If it had of been renewables powering the grid, and a similar cascading failure had occurred, it is likely that it would have been a collapse to blackness.
Conclusions
The above is a simplified explanation of what is needed for reliable grid operation. Proponents of renewable energy do not want to discuss concerns of this sort, particularly the costs involved. When forced to address these issues, they rely on magical thinking, advocating for technologies that either do not yet exist or have not yet been proven to work reliably on a grid. The known solutions are expensive, but the renewable sector doesn’t want to pay for them – their mantra remains that renewables are cheaper than fossil fuels so the others should pay for them – hiding the expense. Add in the costs from the needed system support requirements described above, then renewables are significantly more expensive (and less reliable) than conventional generation. The extra costs of renewables support are being paid for a deteriorating quality of electricity supply. That is why there is a new industry adage –
Cheap renewables are very expensive.
{kind=link}
“Cheap renewables are very expensive.” That last remark says it all. An Editorial in 3/13 Wall Street Journal “The Real Price of Wind and Solar” by the Editorial Board that concludes “Politicians claim renewables enhance energy security, but escalating balancing costs tell a different story. This is a monetary measure of how unreliable renewable supply is, and how much consumers have to spend to keep the lights on. It’s an additional punch in the pocketbook to inflation-beleaguered households after so much of their tax money has gone to subsidize the installation of new windmills and solar panels. And that assumes the lights even stay on as net-zero mandates escalate.”
Fossil fuel networks need backup too — more fossil fuels!
David Appell | March 15, 2023 at 12:38 am | Reply
“Fossil fuel networks need backup too — more fossil fuels!”
Appell – true – 10%-20%
but not the 100% backup that “renewables ” need
I suspect you already knew that – which begs the question –
David,
Some of us learned AC theory in Physics I or II when it was taught years ago. We learned what reactive power was, for example, in theory. Here, Chris and Russell are describing consequences in practise, which is far more demanding.
With some educational background – if you are a geologist, you should have passed exams about it, which might lead you to realise that if the quality of the electricity becomes more variable, the compensatory measures become more frequent and potentially more serious in matters like deaths from blackouts in critical times and places.
It is not hard to deduce that the simple, high-inertia, simpler grid, large point source generators are preferred.
That is why it is blindingly stupid to do away with the lovely coal-fired grid that gave Australia such competitive advantage in attracting industry before about 2005 when the idealism rot started to set in.
Do you wish to argue about this simple set of words?
Geoff S
David Appell | March 15, 2023 at 12:38 am | Reply
“Fossil fuel networks need backup too — more fossil fuels!”
Appleman
One additional response – there is a distinct difference for the reason fossil fuel plants need back up and the reason renewables need back. Its an important distinction and a distinction that someone with a basic understanding of physics and math would understand.
“reason fossil fuel plants need back up and the reason renewables need back. Its an important distinction and a distinction that someone with a basic understanding of physics and math would understand.”
Because FF are a non-renewable and finite resource! What prize do I win????
David Appell | March 16, 2023 at 6:40 pm |
Joey a (mere) accountant wrote:
but not the 100% backup that “renewables ” need
I suspect you already knew that – which begs the question –
“What says a renewable power plant needs a 100% backup that a fossil fuel power plant doesn’t (when it goes down or needs repairs)?”
Apple – You demonstrate an astonishing degree of ignorance on the basics
let me assist you explaining the basics – Renewables need 100% back up because of the wind doesnt always blow and the sun doesnt often shine
FF need backup primarily for scheduled routine maintenance.
Below is a link to EIA – make an honest attempt to become educated
https://www.eia.gov/electricity/gridmonitor/dashboard/electric_overview/US48/US48
David Appell | March 16, 2023 at 8:28 pm |
Little Joey a little accountant wrote:
Apple – I gave you the link – similar data available for germany & australia – Quit being stupid.
You did?
Where?
Appleboy asks Where is the link ?
Apple its in the post you copied and replied to – DUH
Geoff Sherrington commented:
It is not hard to deduce that the simple, high-inertia, simpler grid, large point source generators are preferred.
That is why it is blindingly stupid to do away with the lovely coal-fired grid that gave Australia such competitive advantage in attracting industry before about 2005 when the idealism rot started to set in.
I’m not a geologist and I’m not an engineer. I spent my first semester in college studying engineering, but left to study physics because (1) we were simply formulas to plug into with no understanding of where they came from and not even using the MKS system, and (2) all the other engineering students I met were far-and-away more interested in how much money they would make after graduating.
Also, 3) physics was much more interesting to me. Though of course I recognize the great need for engineers in society and am happy they revel (hopefully) in their job.
Next semester I started in physics and never looked back.
But very tired of engineers’ excuses. The world can’t keep emitting carbon because we are looking at one-half of an ice-age’s worth of warming in a mere 200 years.
Last time it took 12,000 years.
The planet’s systems — ecosystems, farming systems, coastal systems, storm systems, polar regions, glacial systems, sea level, — simply cannot handle 3 C of warming in 200 years. It’s far, far too much to adapt to.
So I’d like to hear less of engineers whining about what can’t be done and more of them writing about what can be done. Rise to the occasion.
120 years ago you’d be telling us how universal electricity was impossible and that we’d just have to accept that horse-drawn carriages must stay as long-term transportation for the future.
So engineers, get it done or move out of the way for those who *will* get it done. (And make a lot of money in the process.)
Do you think you could demand a jet pack, a perpetual motion machine, transmutation of gold? Engineers always we we can do anything if we control one of these parameters: cost, time or quality. With and solar it can be done, but you won’t like the swing parameter.
LOL – so typical of modern physics: engineering is not important because apparently theory trumps reality.
I also particularly like your admonition to “Get It Done or Move Out Of The Way” to engineers. Have you actually ever built or maintained anything physical?
It seems engineering realities don’t matter to a physics type…which is why physics types don’t actually built anything these days.
Young engineer Priests/Priestesses can tap into the supernatural/magic nature of their youth and summon up undreamed-of forces that are capable of violation the laws of physics and, at a higher level, reality itself! DO NOT CROSS THESE PEOPLE!!!
David, Your assumption that mankind and the planet cannot handle climate change (which has occurred for a very long time) is astounding.
Strikes me the more accurate prediction is that those greedily lining their pockets cannot handle those seeking the truth, hence the need to shutdown debate and vilify the opposition.
I am way out of my field here, but I wonder whether the increased complexities and costs of renewable energy described in this article also apply to other locations, for example continental Europe, where distances between production and consumption are dramatically less than in Australia?
bruce good question –
I will note that South Australia area is approx 379k square miles with a population of 1.8million.
for comparison – nevada is 110k sq miles and 3.1m population
arizona is 113k sq miles and 7.2million population.
wyoming with 98k sq miles and 580k population
Basically 1/8 the population density nevada, 75% of the population density wyoming
At 34 degrees south, the weather is quite mild. If there is a place on earth that renewables will work SA is it.
However, as PE & Chris point out, huge hurdles have to be overcome, even in one of the most favorable places for it to work
I’m sure they are very similar, Bruce. Check out the latest articles on Germany and the price of their energy now — 5x what we in the U.S. pay. The UK is also suffering and that is a small island.
Bruce,
CAISO, California Independent System Operator, has noted that keeping the grid up with increasing the levels of RE can get a bit tricky and expensive (https://ddears.com/2023/02/28/another-dangerous-proposal/#comment-7775).
Information flows to CASIO appear to be masking some load activities that can then affect the wholesale market and the physical portions of the grid- both the transmission system and the distribution system. (http://www.caiso.com/Documents/Mar3-2023-OpeningComments-ALJRulingSeekingResponses-Questions-LoadMaskingWorkshop-NetEnergyMetering-R11-09-011.pdf )
Mark Miller
Short answer: yes.
Denmark has changed their entire energy system to compensate for their massive (and massively variable) wind generators, but they 1) have the highest electricity costs in Europe 2) are a natural gas hub and 3) are dependent on dumping their excess, at above market prices, to other larger countries around them. And despite this, they are still under 50% for wind – the rest is “biomass” i.e. wood burning.
Yes, Denmark is deforesting via its “biomass” renewables…
Germany has spent 400 billion euro for its Energiewende – the net result was record dependence on Russian natural gas. Since the Ukraine situation – guess where that leaves them? Germany also spent 807 million euros to dump excess electricity in 2021…
So short answer: Australia is an extreme example. Not just because of its low population densities and distances between generation and consumption, but also because Australia is completely isolated in terms of “grid neighbors”.
>”What is providing the backup generation, other than thermal plant which renewables and batteries are supposed to replace?” [quote from the Morris/Schussler article above]
John Cleese would be proud of that sentence. Says it all …
Bluntly, much thanks to Morris and Schussler for this series of detailed articles. I agree with their conclusions – the renewables activists really do not want to deal with these issues. There seems to be mindset within the various bureaucracies regarding this, that they have these world-beating, soaring, wonderfully intuitive, incredibly intelligent, planet-saving ideas. Making it all work is simply a lesser issue for those who can only do arithmetic.
ianl wrote:
I agree with their conclusions – the renewables activists really do not want to deal with these issues.
Such bullsh!t.
We *know* we have to stop burning carbon.
There is no doubt about that whatsoever.
We *have* to start using sustainable energy.
Period.
It’s necessary in the most important ways, viz ensuring life continues on Earth in the way we know it (which is already pretty crappy compared to what it once was).
Instead of a couple of grumpy old engineers telling us here why it can’t be done, let’s hear from some smart, young engineers about how it can be done and how it *will* be done.
With this kind of sclerotic thinking, we’d never have gotten a power grid in the first place!
Of course we won’t hear from these smart young engineers, because they don’t have time to write blog posts because they are out there doing what needs to be done.
“It isn’t possible, it costs too much, there would never be enough thing-a-ma-jings to balance this-and-that because it would cost a billion gruntels and still the lights would go out every other night without a tremendous amount of the fossil fuels which are killing us.”
(Remember, fossil fuels prematurely kill 1-in-5 people on the planet.)
Fortune favors the brave. It’s the job of engineers to put society’s requirements into action. So get busy and stop all the bitching about it!
Such BS => “We *know* we have to stop burning carbon.”
Is there a mouse in your pocket? “We” do not KNOW we have to stop burning carbon. That is an assumption on your part. Try being honest about that for once in your life.
More BS: (Remember, fossil fuels prematurely kill 1-in-5 people on the planet.)
Another factless fantasy of the left. Honesty eludes you, Appell.
Fossil fuels have extended our lifespan, not shortened it. It has supplied the fuel needed to turn innovation into reality.
Appleboy’s comment –
(Remember, fossil fuels prematurely kill 1-in-5 people on the planet.)
Apple – Again demonstrating complete gullibility. Cant even distinquish real science and agenda driven pseudo science.
jim2,
It’s not just oil, they are trying to ban PFAS too!
https://www.epa.gov/newsreleases/biden-harris-administration-proposes-first-ever-national-standard-protect-communities
This must not stand! I am so tired of big government putting their boot on the throat of industry. I will always trust my health and the environment to DOW Chemical & Exxon over the woke EPA. /s
jim2 | March 15, 2023 at 7:08 am |
More BS: (Remember, fossil fuels prematurely kill 1-in-5 people on the planet.)
“Another factless fantasy of the left. Honesty eludes you, Appell.”
Jim2 – there are several “studies – peer reviewed at that” that make that claim. Though you would think someone with a degree in science and math would have the intellectual capacity to recognize pseudo agenda driven BS masquarading as science.
Appell
For a reason quite mysterious to me, when I read this quote I thought of you.
“ Between hindsight bias, fake causality, positive bias, anchoring/priming, et cetera et cetera, and above all, the dreaded confirmation bias, once an idea gets into your head, it’s probably going to stay there.”
Eliezer Yudkowsky
I guess I qualify as one of those old grumpy engineers. I now spend most of my time mentoring some of those young and more brilliant engineers about the realities they face in their jobs. Something they never were taught about in college and are totally clueless about because all engineering jobs are so specialized.
My read on this most excellent technical post is there are harsh physical realities involved in maintaining a very complicated electrical grid. And like anything involved with engineering, if you ignore those realities, then things will most likely not end well.
It’s my opinion that engineers have a social responsibility to speak out on technical issues where they have expertise, especially when they see foolish ideas being pursued by politicians and social activists that have little to no scientific/engineering knowledge.
I can promise you at least one of the authors is not grumpy. My only statement on carbon emissions that I can recall is to the effect that the more serious CO2 emissions are, the more harmful it will be to pursue unworkable solutions. There are better solutions than wind, solar and batteries at this time.
Gotta marvel at the depth of belief of the zealots.
And at the belief in the power of wishful thinking.
“….let’s hear from some smart, young engineers about how it can be done and how it *will* be done….”
Well, the engineering solutions are apparenlty a long way off.
And you forgot the economic and political changes which are also required to make this fantasy appear to work.
All the believers think they are doomed even with today’s weather, but have this blind faith in a +1.5°C world being somehow perfect.
The logic is baffling.
Mr Appell ventures forth with “Instead of a couple of grumpy old engineers telling us here why it can’t be done, let’s hear from some smart, young engineers about how it can be done and how it *will* be done.” …
Mr Appell clearly has not the IQ to understand (or use) his young engineers remedy is precisely what has been done for years and why we are in an electricity generation mess which is only going to get worse until we look at viable solutions with technology that we know works. That’ll be nuclear generation, hydro, gas, oil and coal. Nuclear is cleaner and greener than wind and solar too and we have seventy plus years of experience with it working really well.
We were panicked into stupid activity with COVID-19 by a new wave of ‘experts’ despite decades of experience with severe acute respiratory viruses and a carefully planned public health response basde on prior experience which was immediately dumped by clueless and dumb idiots who should never had held the offices they did and still do.
We are doing the self same dumb things over climate change without having a scrap of proof that carbon dioxide production has any meaningful effect on temperature coupled with decades of experience at producing grid electricity efficiently – just ask your bosses in China and your chums in India, Mr Appell, what they think of fossil fuel as compared to solar and wind.
Then, Mr Appell, get off your high horse full of stupid ideas and perhaps book yourself five to ten years of rehab. It won’t cure you but it will give the rest of us some relief from your banal and power wasting postings.
David – could you please stop threadbombing your ignorance. Those countries with high renewables are hydro, or in Iceland’s case high temperature geothermal. If you have enough of those, you don’t need thermal stations. Very few nations are in that situation.
They aren’t wind or solar 70% renewables. And if they have interconnectors like Germany or Denmark, the figures are false as it is instantaneos power flows that are relevant. As one of your links stated “Note that most countries import and/or export electricity, so the percentage figure do not reflect the percentage of consumption that is renewable based.”
How about you go away and learn some real engineering rather than just show that your only intellectual skill is that you can google things?
No, we DON’T have to stop burning carbon.
Your understanding of the realities of the effects of climate change are as garbage as your understanding of the realities of engineering.
Throwing a tantrum doesn’t change reality.
Appell, Well, i suppose that if we just ignore reality there is nothing we cannot do. That might work with climate activists, but not so much for those actually working for a living and getting things done.
P.S. Kindly cease insulting engineers.
The local DA should ask Lockheed Martin Skunk Works engineers if they’ll provide him the nickel tour through their fusion prototype facility, they might even pull him along in his red wagon if he asks nicely. Though maybe it would be more productive if they simply got out of his way, or otherwise tap into his swell of gray matter, just to git er done.
WIthout coal the solar panel never would have been made, just think of all the deaths that solar panels have induced. Maybe the egg really did come before the chicken, evolution is a slow process.
David Appell | March 15, 2023 at 12:50 am | Reply
“Of course we won’t hear from these smart young engineers, because they don’t have time to write blog posts because they are out there doing what needs to be done.”
Apple – do you mean young engineers and academics such as Marc jacobson who pontificates that the world can operate with 100% renewables and suffice with only 4-8 hours battery backup
Earth to major Tom !
Joey nothing but a numbers cruncher wrote:
do you mean young engineers and academics such as Marc jacobson who pontificates that the world can operate with 100% renewables and suffice with only 4-8 hours battery backup
No, I don’t.
David Appell | March 16, 2023 at 9:00 pm |
Joey nothing but a numbers cruncher wrote:
do you mean young engineers and academics such as Marc jacobson who pontificates that the world can operate with 100% renewables and suffice with only 4-8 hours battery backup
No, I don’t.”
Yet you are reading from his playbook
“Proponents of renewable energy do not want to discuss concerns of this sort, particularly the costs involved. “
Well, you don’t discuss the costs either, except to say look at this, look at that. The only one you put a number on was FCAS, currently $40/Q, say $160/year. For the population covered, it’s about $8/person/year. That is much less than 1% of the average electricity bill.
What grumblers never want to discuss is the cost of gas and coal.
How much is Snowy II with all the transmission lines going to cost each household Nick? What about the new AC line between SA and NSW?
Last time I looked, lignite in VIC was about $40/MWh.
Well, how much?
On your figures, FCAS is less than $1/MWh. And black coal and gas cost a lot more than lignite.
Nick – why didn’t you just say you don’t know or that the numbers destroy your case? You are just one of the proponents who don’t want to discuss the costs. The type you quoted us referencing.
There is plenty of cheap gas exploitable in Vic and NSW but the governments won’t let them drill for it. Another regulatory/ green blob own goal.
“There is plenty of cheap gas exploitable in Vic and NSW”
So now it’s pixie dust? There will be no cheap gas in Australia. We have export facilities, we pay the world price.
Actually we have gas in Victoria; we have used it for 50 years. It used to be cheap, but now it goes for export too. If we want any, we pay the export price.
You are supposed to be paying export price minus the cost of liquification and maybe shipping. Not sure if that’s happening. Nevertheless, it will still be a higher price than without exports.
Simple algebra: solar PV + wind + trillions of subsidies < fossil fuels
It isn't necessary to discuss the price of fossil fuels vs. "renewables". Unless you deny the reality of the trillions of subsidies for solar PV and wind and the fact that fossil fuels still comprise the vast, vast majority of electricity and other energy delivery – it is clear that solar PV and wind are not even equivalent capabilities/costs much less superior capability or lower cost.
In contrast – the massive utility switchover from coal to natural gas involved no utility level subsidies, neither ITC nor PTC.
I probably shouldn’t show my face here, as I was an advocate of renewables until about 3 years ago, when a series of epiphanies cascaded through my generally progressive world-view and shattered my confidence in the cultural and scientific institutions that feed mainstream policy outlooks.
.
Because I live in Australia, and was progressive, I used to read the blogsite “Renew Economy”, basically a booster for the renewable industry, aimed at enthusiastic progressives who dabble in technology. They, both the fizzy journalists and the with-it audience (me, c.2019), are by the standards of this article, definitely faith-based and magical in their thinking.
.
I checked back into Renew Economy, and here’s the title to their lead today, in stark contrast to what Morris & Shussler have written above:
“Fossil grid smashed by year of weather extremes, as renewables look smarter than ever”. Yassss!!! Handclap emojis!!!
.
And yet, today in Australia’s national broadcaster online news service, the ABC (which I privately call Social Justice News), there’s a striking headline in complete cognitive dissonance: “Electricity prices set to surge up to 30 per cent as regulators reveal draft pricing plans”. No curiosity though by the right-on social justice-oriented journalist as to why this might be so.
.
The penny will never drop for most of such people, even when faced with such blatant contradictions as these in the mainstream narratives. But articles like this by Morris and Shussler, written in good faith with an eye for detail and without emotion, are surely the way a few more will begin to think for themselves.
The fact you can build out renewables doesn’t make it any less stoop id. If you over do it, it will hurt you. Stoop id hurts!
ianalexs,
Welcome here! Your face too.
Would love to see bios for authors of this series and for other posts on this site.
You can click on my name on this article and they have an old bio.
https://www.tdworld.com/grid-innovations/generation-and-renewables/article/20970380/the-myth-of-the-german-renewable-energy-miracle
Additional info. Served on the NERC Planning Committe for a few terms. Chair of the SERC Planning Commitee. Interests are pickelball, onewheeling, paddleboarding, boating, acting.
aplanningengineer: What’s your name? That article has two authors.
aplanningengineer: assuming you’re “Russel Schussler” on the article, the link says you’re retired.
That’s just my point. The future will certainly not be written by those who have built the status quo and have an emotional need to defend it. It never has, ever. It’s built by young people who will understand more and do better.
Nothing personal, but this is the way of the world. You need to accept that as do the rest of us.
Good assumption on the name. It’s atop this article as well. Thanks for the attempt at analyzing me, but no dice. I’m happy to be a small part of a long chain of many good reasoned decisions that build upon the understandings of the past and the opportunities developing with innovation and continuity, Young people will do better, but not with inferior technology and the half baked ideas developed by some of my predecessors and contemporaries. Bad ideas developed in my time live on, despite their poor record, and often exert undue influence today on those without experience.
Appell
Not even in your wildest dreams will you ever have the credentials of PE. You have never shown me you even understand your own field. You certainly haven’t read the literature of climate science. That’s why I’m always providing you with links that apparently you’ve never seen. That’s demonstrated every time you get on here.
Get over yourself and do some self awareness drills.
@David Appell
The Future will certainly not be written by technical writers who have zero experience, understanding or wisdom in the energy field.
Nor are your ridiculous and naive beliefs about “young people” based on anything concrete. “Young people” are focusing on financial engineering and software engineering – neither of which will contribute anything significant to solving real world physical problems. The few who attempt to work on real world stuff are so rare that they get $50/hour just because they know how to machine metal…
I also am highly amused by your attempts to dismiss the real world experience of people like Russell. You clearly don’t understand what NERC and SERC are. At least spend the few seconds on Google to read up.
In the real world, you cannot magically replace the decades old US power grid with something different regardless of what it is. The US power grid was primarily built in the 1950 to 1970 time frame; the large scale transformers underlying it are not even replaceable by US manufacturing as demand is roughly 3x US manufacturing capacity.
The ongoing idiocy and utter lack of operational/manufacturing/engineering understanding of alternative energy advocates is breathtaking.
Staggering sums of money spent chasing the delusion of controlling the planet’s climate by controlling CO2 levels, acting under the illusion that the trace gas controls the climate. Strikes me as fundamentally malicious greed by the few attempting to panic the citizenry with hysterical and nonsensical claims of Armageddon.
More expense for Citizens in the US. Looks like the leftists love “helping the poor” so much, they want to push more of us into poverty so they can “help” us.
Arnold said he’s committed “several hundred million dollars” to Grid United, a joint venture he co-founded with transmission pioneer Michael Skelly, to acquire land, easements and the permits needed to build power lines that can stretch for hundreds of miles. Arnold and Skelly are seeking to break a longstanding challenge in the industry where regulators, utilities, customers and investors are wary of projects that haven’t already secured necessary approvals.
…
Houston-based Grid United has announced five projects and has as many as five more in the works, and Arnold said the company is actively buying up land for three power lines. Each of these massive overhead electric highways can cost $1 billion to $3 billion and can carry 1.5 gigawatts to 3 gigawatts. One gigawatt is enough to power about 200,000 Texas homes, and as many as 800,000 homes in parts of the Midwest that use less energy. That capacity will be crucial to carrying clean energy from wind and solar farms that are expected to be built across the US with incentives from the IRA.
https://www.bloomberg.com/news/articles/2023-03-15/commodities-billionaire-arnold-betting-on-long-haul-power-lines-needed-for-green-transition
@jim2 | March 15, 2023 at 11:11 am in suspense
“….. Proponents of renewable energy …….rely on magical thinking,”
This is true of the same group, whether one is speaking of renewable energy or global warming or economics.
There is a detachment from reality and a utopian world view.
The renewables have trillions authorized. When they consider costs, it is to get their own largest percent.
Big green energy requires a huge bundle of the other kind of green …
Shock power bill jump to hammer households
Perry Williams, The Australian
Power bills for households will soar by hundreds of dollars a year from July 1, adding to soaring cost of living pressures as the regulator blamed supply challenges and volatility for the steep cost hit.
Customers in Victoria face a 30 per cent jump on ‘safety net’ prices while households in NSW, South Australia and southeast Queensland will see bills soar by up to 24 per cent.
The Victorian ruling by the Essential Services Commission estimates power costs will jump by $426 for residential customers to $1829 a year while small businesses face bills surging by a third or $1738 a year to $7358.
Energy Minister Chris Bowen suggested measures would be introduced in the May budget to help households cope with the coming bill shock. … “Russia’s invasion of Ukraine has seen energy costs skyrocket globally, and Australia has not been immune,” he added.
https://joannenova.com.au/2023/03/mystery-australians-invest-billions-in-free-wind-and-solar-but-prices-rise-another-20-30/
Russia is still pumping so much oil it has depressed oil prices. It’s a common lie told by leftist, Green Doomer politicians that it’s Russia, Russia, Russia’s fault.
South Australia has comprehensively demonstrated the failure of wind power because every morning and evening when the wind is average or less, they import coal power from Victoria, or from further afield if the wind is low in Victoria as well. Yesterday was a spectacular demonstration with next to no wind in both SA and Victoria. Under these circumstances no amount of additional wind and solar capacity will help. To coin a phrase “It’s the wind supply, stupid!”
https://newcatallaxy.blog/2023/03/15/rip-net-zero/
See the links in the blog post and also have a look at the work of The Energy Realists of Australia.
https://www.flickerpower.com/index.php/search/categories/general/list-of-briefing-notes
With the world burning more coal as Russia’s war in Ukraine plunged global energy markets into chaos, commodities giant Glencore Plc pulled in a record $34 billion in profit last year. Gary Nagle, its boss, makes no apologies for more than half of that windfall coming from coal. At the same time, he also wants investors to focus on the minerals needed for a battery-powered future: copper, cobalt and nickel. “We must transition,” Nagle says. “It’s the responsibility of those involved in the business.”
https://www.bloomberg.com/news/articles/2023-03-16/glencore-ceo-not-sorry-for-coal-windfall-on-way-to-a-low-carbon-world
In Australia, the madness continues. NSW is closing down next month a big coal fired power station, even though they are a net importer of energy, the interconnector to QLD often near rating, and they have no replacement stations online. This will affect the whole of the NEM as QLD often exports to NSW, who exports to VIC who exports to SA & TAS.
https://wattclarity.com.au/articles/2023/02/20feb-closure-expectations-liddell-and-eraring/
Chris Morris just commented:
In Australia, the madness continues. NSW is closing down next month a big coal fired power station, even though they are a net importer of energy, the interconnector to QLD often near rating, and they have no replacement stations online. This will affect the whole of the NEM as QLD often exports to NSW, who exports to VIC who exports to SA & TAS.
Do you predict large-scale outages??
Let’s check back in 6 months, OK Chris?
No David. As is par for your method of attack, you didn’t read what I wrote, then attacked the straw man you created.
They didn’t even have to wait for Liddell to shut. The NSW/ QLD spot prices on the 19th at 17:35 (sun going down time) went through the roof because there were not enough renewables in NSW, the interconnector from VIC was at rating and QLD was having its own problems. Lots of constraints and lack of reserves notices
https://wattclarity.com.au/wp-content/uploads/2023/03/2023-03-19-at-17-35-nemwatch-spike-qldandnsw-1.jpg
Actions have consequences
There is a good older article on Wattclarity about the problems with trying to run unrestricted load on a high renewables grid. It includes this quote “Perhaps more telling has been that the state-based schemes for support of renewable development appear to have continued (to our knowledge) without any real nod of understanding that the time and the place of generation are essential components of making the energy transition work”
https://wattclarity.com.au/articles/2020/10/shortcomingsof-anytimeanywhere-energy/
No David – the job of engineers is to make scornful replies when idiots like you make stupid comments showing they know nothing about what they are talking about.
It is certain you haven’t actually comprehended anything written about or digested any of the links. That is why you are on the progressive side of the Democrat party no doubt.
Another interesting older Wattclarity article on how renewables even in 2020 had created future problems both by the subsidies they got and the costs for keeping the lights on. To quote:
“Given the geography of the ACT, and the results of the various auctions, it has been patently obvious that the way in which the incentive was provided is that it was explicitly focused on provision of ‘anytime/anywhere energy’ so that the ACT Government could gain the kudos and warm inner glow of being ‘100% renewable’ with the messy bits of provision of ‘keeping the lights on services’ being abdicated to AEMO and ‘the NEM’ and essentially viewed as someone else’s problem.”
https://wattclarity.com.au/articles/2020/03/villainno7-is-killing-with-kindness/
A picture can tell a thousand words.
Engineering reality versus political dreams. Geoff S
https://twitter.com/i/status/1632720289720066051
I have two degrees in engineering and one in business administration. Many moons ago when I was in engineering school, I took a course in engineering economics. That course complemented the ones I took later in my career in macro economics, micro economics, project management, cost estimating, and technology management. Graphical analytics played an important role in all of those academic courses.
Here is a graph from Jo Nova which documents reality in one concise informational package:
https://joannenova.com.au/wp-content/real-electricity-prices-australia-1955-2017.jpg
Climate activists will look at this graph and say that correlation is not causation. If this is the case, if there is no true correlation between the price of electricity and the progressive replacement of coal and gas-fired power generation with wind and solar, then these activists should offer a detailed economic analysis which identifies the inflection point in the future when the upward trending price of electricity in Australia reverses course and begins to fall as fossil generation resources are progressively retired.
Beta – Concur
The two most important concepts I learned in micro economics were the supply and demand curves and the concept of marginal cost/marginal benefit analysis (not cost benefit analysis which often leads to erroneous conclusions). Marginal cost /marginal benefit analysis is vastly better.
The concepts of the supply and demand curves and the marginal cost/marginal benefit analysis span across multitude of disciplines.
Beta Blocker,
Here is a graph to end 2022 showing much the same as the Jo Nova graph. Geoff S
https://www.geoffstuff.com/cpi2022.jpg
Geoff, the western world is on the precipice of 1930’s style economic depression, with the Net Zero transition acting as one important structural cause among several structural causes which threaten the western world’s economic stability.
An equivalent CPI graph generated in the year 2033 is likely to show the growth of Australian CPI moving in direct lockstep fashion with the increasing penetration of wind and solar in the Australian power grid.
A better picture is the South Australian geothermal plant. Strangely, no-one wants to talk about what was the really hot topic and the future 10 years ago.
Geothermal is nice but there are very clear limits on how much geothermal can really be used at the grid level.
It is very spread out like solar except you have to add the extra cost of drilling to access it – which is why viable geothermal plants at the grid level are simply never going to be very common.
Where exactly is the South Australian geothermal area?
I can’t be bothered digging out the reports but IIRC, there was an area in the Cooper Basin where there were elevated temperatures (about 200°C) that was above oil and gas wells drilled in the area. The rock was impermeabile though.
They wasted a lot of money drilling wells, fracking and other permeability improvements. They got some discharge, ran an experimental plant at about 1MW for a while. Then it died and everything was abandoned, never to be spoken of again.
I think the writeoff cost was about $100M, chump change compared to cost of other renewable subsidies.
I’m sure Norway has the best of the best “green” intentions. But in the meantime, they are cleaning up on fossil fuels.
OSLO, March 14 (Reuters) – Norwegian state energy firm Petoro reported on Tuesday more than a doubling of its annual earnings thanks to soaring gas prices and said it expected the world to need petroleum supplies “for a long time to come”.
The oil and gas company’s net profit rose to a record 539 billion Norwegian crowns ($50.74 billion) in 2022 from 222 billion the previous year, its annual report showed.
Norway became Europe’s largest supplier of natural gas last year as Russia’s Gazprom cut deliveries over the West’s support for Ukraine, sending European gas prices to all-time highs.
https://www.reuters.com/article/petoro-results-idUSL8N35M26Z
Yes, it always amuses me how few people know what country has the largest sovereign wealth fund. Not Saudi Arabia or Kuwait or even China, the answer is…Norway. Funded almost entirely from fossil fuel investments.
good
Pingback: Australian renewable energy transition. Part 3 | Watts Up With That?
Pingback: Australian renewable energy transition. Part 3 - USA weather forecast
Pingback: Australian renewable energy transition. Part 3 - Lead Right News
Pingback: Australian renewable vitality transition. Half 3 - news page
Pingback: Australian renewable energy transition. Part 3 - Climate- Science.press
We watched as Dr. Curry and others admirably pointed out how climate models are useful but imprecise b/c earth’s coupled ocean/atmosphere/terrestrial systems are so complex.
Sulfate aerosols, clouds, water vapor, parameterization, etc., etc., etc.
We agreed with all these technical criticisms (atmospheric physics, chemistry, thermodynamics, residence times, etc.).
But under all that we were watching birth rates at a high resolution level. We saw mistakes that were far more fundamental.
And looking back and tearing apart the population assumptions in the original IS92, SRES, RCP, SSP and all emissions scenarios from then until now, it appears our original assumptions were at least partly correct.
As we stated in our new Substack “environMENTAL”, this a.m. See > https://envmental.substack.com/p/the-population-bombing
Pingback: Australian renewable energy transition. Part 3 | ajmarciniak
As yet, there’s no substantial evidence of the 500,000-barrels-a-day output cut that Russia said it would impose in March — though any drop in production at oil fields in Siberia may take some time to show up in flows from the Baltic or Black Sea ports. In another indication that Moscow may not yet be implementing the planned reduction, the country’s crude oil storage tanks have topped 15 million barrels for the first time since April.
https://www.bloomberg.com/news/articles/2023-03-20/russia-s-oil-flows-hold-up-despite-pledged-production-cut
@ jim2 | March 20, 2023 at 7:40 am in suspense.
This engineer appreciates this series of articles by Chris Morris and Russ Schussler; very informative.
As I like to say, reality bats last, and here in the Peoples Republic of California, that reality overcame ideology (however briefly) when shutting down 2200 MW of carbon-free nuclear baseload generation sank in. Plus we enjoy the privilege of paying 50% above the U.S. national average for electricity. It will be interesting when (as occurred last summer), neighboring states curtail exports into California as they meet their own electricity needs.
Mark,
CASIO’s efforts to keep the grid up this summer should be a bit easier given large hydro capacity is going to be close to, if not at, record levels. Curtailments on the other hand will likely be a bit more difficult to manage.
CASIO updated their “Effectiveness Factors” recently- http://www.caiso.com/Documents/2210Z.pdf
Hopefully the updates will reduce the likelihood of physical asset failures.
http://www.caiso.com/informed/Pages/ManagingOversupply.aspx#dailyCurtailment
Pingback: The World Without Russia | al fin next level
Smartest comment I ever heard about the climate wars… “who and when was it decided that the current temperature is the perfect one for the planet? “
Another insider blogger writes about the same issues the authors have but about Europe which are having the same problems. Power prices going up and reliability going down. To quote one of the articles: “End user prices have risen steadily over the past 20 years, in line with the subsidisation of renewable generation. While correlation does not necessarily indicate causation, no such trend is evident in wholesale prices, and with the increased deployment of renewable generation, consumers have faced not only the costs of subsidies, but also the costs of building new grid infrastructure to connect these renewables, as well as the costs of balancing their intermittency and providing back-up for when wind drops or there is no sun (it is depressing how often people need to be reminded that the sun sets before the winter evening peak, meaning solar contributes absolutely nothing to the periods of highest grid demand). ” That looks similar which we wrote and for the same reasons.
https://watt-logic.com/blog/
“(it is depressing how often people need to be reminded that the sun sets before the winter evening peak, meaning solar contributes absolutely nothing to the periods of highest grid demand)”
Chris – what is depressing is that even when known, the advocates think “smart technology ” and “storage ” can overcome reality.
Joe What is more depressing is that the no-nothings (which includes almost all politicians) believe that legislation can overide reality and the laws of physics. The standard of practical scientific knowledge in the populace is now so low that it is not seen for what it is.
Chris
I thought Congress passed a law a few years back repealing the law of gravity. Did you miss that?
Leftist politicians believe that legislation can indeed overide reality and physics, because they recognize the maleability of cultural ignorances that enables an alignment of power for favor.